对数据和函数的存储类别可分为:自动的(auto)、静态的(static)、寄存器的(register)、外部的(extern)。非线性运算的方法:级数展开法、查表法、混合法
DSP实现的一般方法:(1)、在通用的计算机上用软件实现。(2)、在通用的计算机系统上加上专用的加速处理机实现(3)、在通用的单片机上实现。(4)、在通用的可编程DSP芯片实现(5)、在专用的DSP芯片实现、
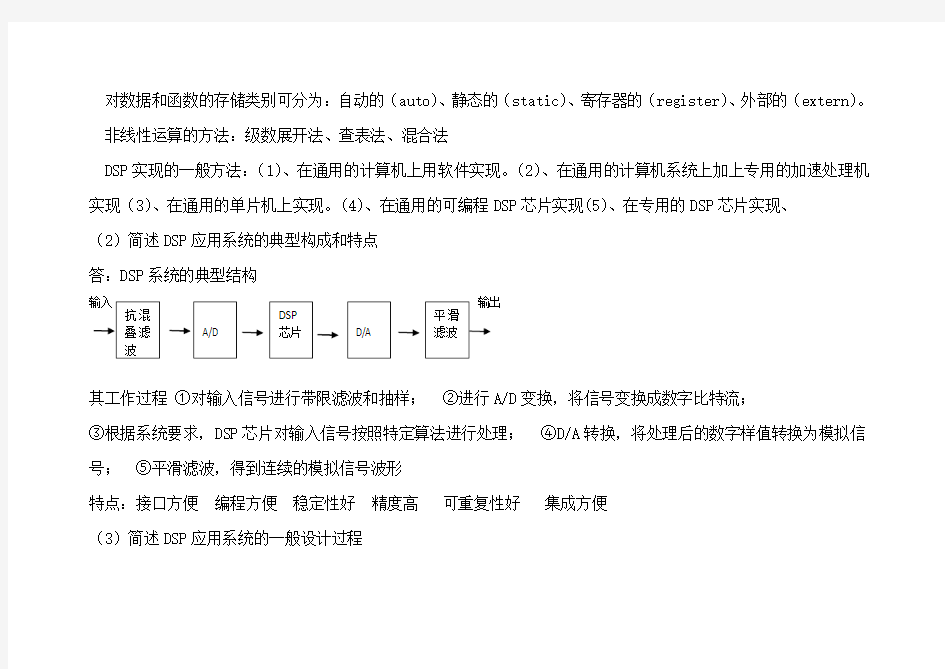
(2)简述DSP应用系统的典型构成和特点
答:DSP系统的典型结构
其工作过程①对输入信号进行带限滤波和抽样;②进行A/D变换,将信号变换成数字比特流;
③根据系统要求,DSP芯片对输入信号按照特定算法进行处理;④D/A转换,将处理后的数字样值转换为模拟信号;⑤平滑滤波,得到连续的模拟信号波形
特点:接口方便编程方便稳定性好精度高可重复性好集成方便
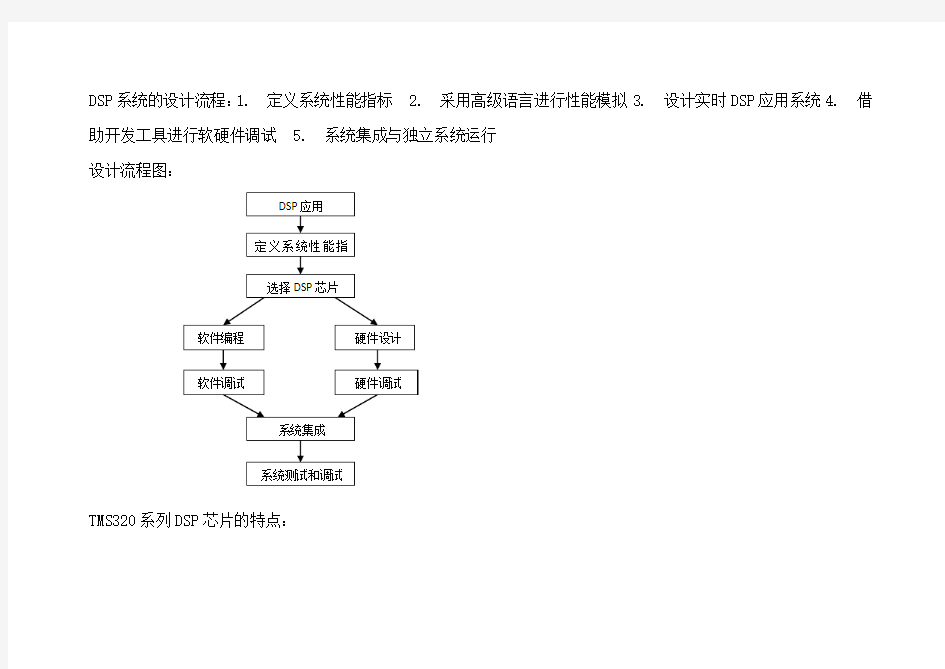
(3)简述DSP应用系统的一般设计过程
DSP系统的设计流程:1. 定义系统性能指标 2. 采用高级语言进行性能模拟3. 设计实时DSP应用系统4. 借助开发工具进行软硬件调试 5. 系统集成与独立系统运行
设计流程图:
TMS320系列DSP芯片的特点:
1.采用哈佛结构实现内部总线;
2.采用流水线操作实现指令操作;
3.乘法采用专用的硬件乘法器实现;
4.具有高效的DSP指令
哈佛结构的特点:将程序和数据存储在不同的存储空间
流水线的特点:采用流水线操作,处理器可以并行处理多条指令,提高CPU工作效率
DSP芯片的运算速度指标:
指令周期 MAC时间 FFT执行时间 MIPS:每秒执行百万条指令 MOPS:每秒执行百万条操作 MFLOPS:每秒执行百万条浮点操作 BOPS:每秒执行十亿次操作
(8)设计DSP应用系统时,如何选择合适的DSP芯片
答:DSP芯片的选择要根据实际系统的需要来选择DSP芯片,已达到系统最优化的设计。
所以一般选择DSP芯片要考虑以下因素:
芯片运行速度、DSP芯片的价格、DSP芯片的硬件资源、DSP芯片的运算精度、DSP芯片的开发工具、DSP芯片的功耗等因素。
(9)TMS320VC5416-16工作在160MHz时的指令周期是多少ns?它的运算速度是多少MIPS?当工作在100MHZ时,
其指令周期和运算速度是多少?
解:指令周期T=1/160M=6.25ns; 运算速度:160MIPS
当工作在100MHz时,指令周期:T=10ns; 运算速度:100MIPS
(10)一个DSP系统的采样频率是10KHZ,采用的DSP芯片的指令周期是10ns。如果某DSP算法是按样点处理的,问算法实时运行的条件是什么?如果DSP芯片是按帧处理的,且帧长是10ms,则在一帧时间内最多可以运行多少个指令周期。
解:按样点处理:如果采样频率时10KHz,那么采样周期为100us,又因为指令周期为10ns(指令周期在大小上等于MAC),所以在一次采样周期内,最多可以完成的MAC的个数是:100us/10ns=10000条指令,所以如果要实时运行,所运行的指令数不能超过10000个。
10ms/10ns=1000000个。所以,一帧内可以运行10^6个指令周期。
第二章
(1)DSP芯片的基本结构:CPU、总线、存储器以及集成外设与专用硬件电路等
CPU主要包括:算数逻辑单元(ALU)、累加器(ACC)、乘累加单元(MAC)、移位寄存器和寻址单元。
存储器包括:ROM、Flash、单访问RAM(SARAM)、双访问RAM(DARAM)等
(2)ALU与累加器的区别是什么?
算术逻辑单元ALU可以实现加/减法运算、逻辑运算等大部分算术和逻辑功能,且许多运算可以在一个周期内完成,ALU的运算结果通常被送往累加器;累加器是DSP中的一个特殊的寄存器,用于存放ALU单元或者其他运算逻辑单元的运算结果,同时作为一些运算逻辑单元的输入,以提供一个中继的功能
(3)什么是冯诺依曼结构和哈佛结构?二者有什么区别?
答:冯·诺依曼结构:程序指令与数据共享同一存储空间,统一编址,依靠指令计数器提供的地址来区分是指令还是数据;采用同一条地址和数据总线进行访问。
哈佛结构:将程序和数据存储在不同的存储空间中,独立编址,独立访问;程序总线和数据总线分开,数据吞吐量提高了一倍
(4)什么是流水线操作?简述其工作原理。
答:流水线的原理:将指令分成几个子操作,不同的子操作由不同的单元完成。这样每一个时钟周期,每个单元都可以进入一条新指令。因此在同一个时钟周期内,在不同的单元可以处理多条指令,相当于并行指令了多条指令。(5)如何利用I/O口实现UART通信。
答:大多数DSP芯片中都设置了通用的I/O(GPIO)口。GPIO与定时、中断和各种时序有机的结合,就可以模拟出绝大多数的串口通信方式。
(6)HPI口的特点
答:接口所需硬件少;允许一个或两个选通信号,一个独立或复用的地址总线,一个独立或复用的数据总线接到MCU 上;主机和DSP可以独立的控制HPI;主机和DSP握手可以通过中断方式完成;主机可以通过HPI接口装载DSP应用程序,接受DSP运行结果或诊断DSP运行状态。
(9)TI公司的定点DSP芯片有哪些?各有什么特点。
答:TMS320C2000系列:主要用于工业控制领域
MS320C5000系列:主要用于音频领域和低质量的视频领域TMS320C6000系列:主要用于高质量的视频领域
第三章
(1)已知一十六进制数3000H,若该数分别用Q0,Q5,Q15表示,计算该数的大小。
答:这道题是一道定点转浮点的题:3000H=(0011 0000 0000 0000)B
用Q0表示为12288;用Q5表示为12288/(2^5)=384;用Q15表示12288/(2^15)=0.375
(2)若某一变量用Q10表示,计算该数所能表示的数值范围和精度。
答:Q10的最大值:((2^15)-1)*2^-Q=31.9990234
Q10 的最小值:-2^15*2^-Q=32
Q10的精度:2^-Q=1/1024
(3)已知x=0.4567,试分别用Q15,Q14,Q5将该数转化为定点数(考虑舍入和不考虑舍入两种情况)
答:这是一道浮点转定点的题:在不考虑舍入的情况下:用Q15表示:[0.4567*2^15]=14965
用Q14表示:[0.4567*2^14]=7482;用Q5表示:[0.4567*2^5]=14
考虑舍入情况下:用Q15表示:[(0.4567*2^15)+0.5]=14965; 用Q14表示:[(0.4567*2^14)+0.5]=7483; 用Q5
表示:[(0.4567*2^5)+0.5]=15
(4)函数f(x)=2(1+x^2),-1 解:若-1 查表可以发现:x 的Q值是15,f(x)的Q值是13 (5)两个数x,y分别用0.45和1.97,试采用16位定点法(保持最大精度),计算x,y之和及乘积,并比较定点和浮点的结果。 解:定点加法:首先进行浮点加法运算,大致确定x,y,z的范围:0.45+1.97=2.42 确定精度:x的精度:15,y的精度:14;z的精度:13 x的定点结果:14745 ;y 的定点结果:31457 z=(x+y*2)/4=19414 z 的浮点表示:2.37 定点乘法:首先进行浮点乘法:0.45*1.97=0.8865 大致确定精度为,x:15;y:14;z:15 x的定点结果:14745 ;y 的定点结果:31457 Z=(x*y)*2(Qz-Qx-Qy)=28310 化为浮点数:0.87 第四章 (1)DSP软件开发的工具有几类,各有什么作用? 答:软件开发过程要使用代码生成工具,代码调试工具,代码优化工具,代码管理工具等 代码生成工具:是指把高级语言,汇编语言,或二者的混合编码程序转化为DSP可执行的目标代码。代码调试工具:是对DSP程序及系统进行调试使之能够达到设计功能的工具程序。 代码优化工具:代码优化器是对C语言进行优化使之能够达到一定运算量要求的程序。 代码管理工具:是对整个系统所涉及的文件进行管理,使之便于大规模的系统开发。 (2)从Sample.c源程序到最终的Sample.out,中间需要经过哪些步骤? 答:C语言实现 C编译器 汇编编译器 目标文件 链接器 可执行文件 (3)CCS集成开发软件有哪些功能,与原先的DSP开发软件相比有哪些优势? 具有编辑、编译、链接、软件仿真、硬件调试及实时跟踪等功能: 优势;A.集成的代码生成工具使开发设计人员不必在DOS窗口输入大量的命令及参数; B.集成的调试工具使调试程序一目了然,大量的观察窗口使程序调试得心应手。提供配置、构造、调试、跟踪和分析程序的工具。 A.加速和增强了实时、嵌入信号处理的开发过程; B.在基本代码产生工具的基础上增加了调试和实时分析的功能 第五章 (1)从C语言程序到汇编语言程序,C语言编译器完成的处理? C语言文件--- 语法分析器 ---- 优化器 ---- 代码生成器 ----- 汇编源文件 (2)C语言程序代码优化有几种方法 答:算法优化编译优化函数优化 (3)利用C语言实现中断函数,有什么要求 答:(1)对由SP指向的字,编译器可能正在使用,因此必须加以保护(2)中断的屏蔽和使能必须由程序员设置3)由于C语言编写中断时,需对所有寄存器进行保护4)中断程序没有参数传递(5)将一个程序与某个中断关联时,必须在相应的中断矢量处加跳转指令 第六章 (2)说明.text块 .data块和.bss块分别包含什么内容? 答:.text块:通常包含可执行代码(代码块。 .data块:通常包含初始化变量(数据块)。 .bss块:通常为未初始化的变量的保留空间(保留块。) (3)链接命令文件包括哪些内容? 答:链接器提供两个命令完成上述功能:MEMORY和SECTIONS。MEMORY命令定义目标系统的存储器,程序员可以定 义每一块存储器,指定每一块的起始地址和长度。SECTIONS告诉链接器如何组合输入块以及在存储器何处存放输出快。若不用这两个命令,链接器会采用默认的分配算法。若要使用这两个命令,一般需要链接命令文件,扩展名为.cmd。因此程序员先根据系统要求编写一个链接命令文件,并把它添加到工程文件中。 第七章 (1)汇编语言格式包含哪几部分?编写汇编语言需要注意哪些问题? 答:汇编语言格式包括四部分:标号域,指令域,操作数域和注释域 注意事项:(1)语句必须以标号,空格,星号或分号开始。 (2)标号为可选项,若要使用标号,则必须从第一列开始。标号长度为32个字符, 字母,数字和$(数字不打头)组成。标号后必须跟冒号(:),但并不作为标号的一部分 (3)每个域必须要有一个或多个空格分隔开。 (4)注释是可选项,第一列可以用星号或分号,但其他列开始的注释前面只能表分号。 (5)指令域一定不能从第一列开始,否则将被视为标号 (6)操作数域内写操作数,若为立即数,需要用#开始,若要间接寻址,则要以*开始 (2)C54x的指令集包含了哪几种基本类型的操作? 答:C54x包含了四种基本类型的操作:算术指令,逻辑指令,程序控制指令,装载和存储指令 (3)C54x提供了哪些基本的数据寻址方式? 答:数据寻址:立即数寻址,绝对地址寻址,累加器寻址,直接寻址,间接寻址,存储区映射寄存器寻址,堆栈寻址 第八章 (1)为什么通常需要采用C语言和汇编语言的混合编程方法答:原因:用C语言开发DSP程序不仅使DSP开发的速度大大加快,而且DSP程序的可读性和可移植性显著提高,程序修改也非常方便。但在某些情况下C代码的效率还是无法和手工编写的汇编代码的效率相比,如FFT程序。用C语言编写的中断程序虽然好读,但是其运行效率不高,当中断被反复调用时,就会大大的降低程序运行效率。所以为了解决上述问题,提出了C语言和汇编语言混合编程的方法。 (2)C语言和汇编语言的混合编程方法主要有哪几种?各有什么特点? 答:独立编写C语言和汇编语言 直接在C语言程序的相应位置嵌入汇编语言 对C语言进行编译,生成相应的汇编语言 (3)整型变量var和整型数组table[10]已经在汇编程序中定义为全局变量和全局数组,试说明如何在C程序中访问var变量和table数组并编写相应的TMS320C54x程序。 汇编语言: .global _var;定义外部变量x .global _table;定义数组 .sect “table_1”;定义一个独立快 _table: ;数组起始地址 .float 0.00 .float 0.02 .float 0.03 .float 0.00 .float 0.02 .float 0.03 .float 0.00 .float 0.02 .float 0.03 .float 0.03 C 程序: extern int var; //定义外部变量var=1;//访问变量 float table[10];//定义外部数组float *p=table;//定义指针 f=p[2];//访问p (4)在汇编程序中如何访问C程序中定义的全局变量和全局数组?试编写TMS320C54x程序进行验证。访问在C程序中定义的全局变量 int i; float x; void main(void) { ……} 汇编程序: .global _i ;定义i为全局变量 .global _x ;定义x为全局变量 LD @_i,A ;A=i ST T,@_x ;x=T s_add .word _s 数组s的起始地址.text LD 0,T ;T=0 ST T,@_h+1 ;h[1]=0 ST T,@_s+10 ;s[10]=0x55 访问在C程序中定义的数组 int h[20]; float s[80]; void main(void) { ……} 汇编程序: .global _h ;定义_h为全局变量 .global _s ;定义_s为全局变量 .data h_add .word _h 数组h的起始地址 s_add .word _s .text LD 0,T ; T=0 ST T,@_h+1 ;h[1]=0 ST T,@_s+10 ;s[10]=0x55 第九章 (2)CPU与外设传输数据的主要方式有哪些?试比较它们的优缺点。 答:CPU和外设之间的传送方式有三种:查询传送方式、中断传送方式、DMA传送方式 优缺点:查询方式:结构简单,CPU通过不断查询外设状态信号,来确定是否发送或接受。所以其缺点也是很显然 的,占用了大量的CPU的资源。 中断的方式:大大提高了CPU的效率,利用外设向CPU申请中断的方式,来处理是否发送或接受。缺点是还是需要CPU去处理数据的发送和接受 DMA:利用硬件直接处理外设,不需要通过CPU,使CPU从繁冗的外设中解放出来,处理更多的数据,当然缺点是增大了硬件成本,电路结构复杂。 (3)DSP中断处理步骤 接收中断请求:通过软件或硬件请求挂起主程序。如果中断源正在请求一个可屏蔽中断, 则当中断被接收到时中断标志寄存器(IFR)的相应位被置1。 应答中断:如果中断是可屏蔽的,则依定义条件的满足与否决定DSP如何应答中断。 如果是非屏蔽硬件中断或软件中断,中断应答是立即的。 执行中断服务程序:一旦中断被应答,执行中断向量地址所指向的分支转移指令,并执 行中断服务程序 答:首先:CPU判断中断响应条件是否满足。一旦满足,CPU就开始响应中断请求 然后,通常把需要保护的寄存器值保护起来 执行相应的ISR 最后恢复现场返回。 (4)DSP中断矢量表重定位如何实现? 答:中断矢量表可以通过修改IPTR实现重定位。 十一章 (1)一个DSP最小硬件系统一般包括哪些部分 答:DSP基本硬件系统包括:复位电路、电源电路、时钟电路、JTAG电路以及其他外设 (2)一个DSP系统中采用TMS320VC5402 DSP 芯片,系统中还有若干5V器件,试为该系统设计合理的电源答:略(应该不考) (3)如何保证硬件系统的稳定可靠?主要有哪些方法 答:为了提高DSP的可靠性,必须考虑接地、屏蔽、隔离等技术的应用。 数字信号处理习题及答案1 一、填空题(每空1分, 共10分) 1.序列()sin(3/5)x n n π=的周期为 。 2.线性时不变系统的性质有 律、 律、 律。 3.对4()()x n R n =的Z 变换为 ,其收敛域为 。 4.抽样序列的Z 变换与离散傅里叶变换DFT 的关系为 。 5.序列x(n)=(1,-2,0,3;n=0,1,2,3), 圆周左移2位得到的序列为 。 6.设LTI 系统输入为x(n) ,系统单位序列响应为h(n),则系统零状态输出 y(n)= 。 7.因果序列x(n),在Z →∞时,X(Z)= 。 二、单项选择题(每题2分, 共20分) 1.δ(n)的Z 变换是 ( )A.1 B.δ(ω) C.2πδ(ω) D.2π 2.序列x 1(n )的长度为4,序列x 2(n ) 的长度为3,则它们线性卷积的长度是 ( )A. 3 B. 4 C. 6 D. 7 3.LTI 系统,输入x (n )时,输出y (n );输入为3x (n-2),输出为 ( ) A. y (n-2) B.3y (n-2) C.3y (n ) D.y (n ) 4.下面描述中最适合离散傅立叶变换 DFT 的是 ( ) A.时域为离散序列,频域为连续信号 B.时域为离散周期序列,频域也为离散周期序列 C.时域为离散无限长序列,频域为连续周期信号 D.时域为离散有限长序列,频域也为离散有限长序列 5.若一模拟信号为带限,且对其抽样满足奈奎斯特条件,理想条件下将抽样信号通过 即 可完全不失真恢复原信号 ( )A.理想低通滤波器 B.理想高通滤波器 C.理想带通滤波器 D.理 想带阻滤波器 6.下列哪一个系统是因果系统 ( )A.y(n)=x (n+2) B. y(n)= cos(n+1)x (n) C. y(n)=x (2n) D.y(n)=x (- n) 1.4 习题与上机题解答 1. 用单位脉冲序列δ(n)及其加权和表示题1图所示的序列。 题1图 解:x(n)=δ(n+4)+2δ(n+2)-δ(n+1)+2δ(n)+δ(n -1)+2δ(n -2)+4δ(n -3)+0.5δ(n -4)+2δ(n -6) 2. 给定信号: ?? ? ??≤≤-≤≤-+=其它04 061 452)(n n n n x (1) 画出x(n)序列的波形, 标上各序列值; (2) 试用延迟的单位脉冲序列及其加权和表示x(n)序列; (3) 令x 1(n)=2x(n -2),试画出x 1(n)波形; (4) 令x 2(n)=2x(n+2),试画出x 2(n)波形; (5) 令x 3(n)=x(2-n),试画出x 3(n)波形。 解:(1) x(n)序列的波形如题2解图(一)所示。 (2) x(n)=-3δ(n+4)-δ(n+3)+δ(n+2)+3δ(n+1)+6δ(n)+6δ(n -1)+6δ(n -2)+6δ(n -3)+6δ(n -4) (3)x 1(n)的波形是x(n)的波形右移2位,再乘以2,画出图形如题2解图(二)所示。 (4) x 2(n)的波形是x(n)的波形左移2位,再乘以2,画出图形如题2解图(三)所示。 (5) 画x 3(n)时,先画x(-n)的波形(即将x(n)的波形以纵轴为中心翻转180°),然后再右移 2位, x 3(n)波形如题2解图(四)所示。 3.判断下面的序列是否是周期的; 若是周期的, 确定其周期。 (1)是常数 A n A n x 8π73 cos )(??? ??-=π (2))8 1 (j e )(π-= n n x 解:(1) 因为ω=7 3 π, 所以314 π 2= ω , 这是有理数,因此是周期序列,周期T=14。 (2) 因为ω=81 , 所以ωπ2=16π, 这是无理数, 因此是非周期序列。 4. 对题1图给出的x(n)要求: (1) 画出x(-n)的波形; (2) 计算x e (n)=1/2[x(n)+x(-n)], 并画出x e (n)波形; (3) 计算x o (n)=1/2[x(n)-x(-n)], 并画出x o (n)波形; (4) 令x 1(n)=x e (n)+x o (n), 将x 1(n)与x(n)进行比较, 你能得到什么结论? 解:(1)x(-n)的波形如题4解图(一)所示。 (2) 将x(n)与x(-n)的波形对应相加,再除以2,得到x e (n)。毫无疑问,这是一个偶对称序列。x e (n)的波形如题4解图(二)所示。 (3) 画出x o (n)的波形如题4解图(三)所示。 (4) 很容易证明:x(n)=x 1(n)=x e (n)+x o (n) 上面等式说明实序列可以分解成偶对称序列和奇对称序列。偶对称序列可以用题中(2)的公式计算,奇对称序列可以用题中(3)的公式计算。 5.设系统分别用下面的差分方程描述,x(n)与y(n)分别表示系统输入和输出,判断系统是否是线性非时变的。 第一章 第二章 11-=--m/2 m=-m -/2 12 m=--/2 -/21 2 m=-m=-()121.7DTFT[x(2n)]=(2n)e m=2n DTFT[x(2n)]=(m)e =[()(1) ()]e [()e e ()e ] [()()] j n n j m j m j m j m j m j j x x x m x m x m x m X e X e ωωωωπ ωωωπ∞ ∞∞ ∞∞ ∞∞ ∞ ∞ ∞-+-=+ =+∑∑ ∑∑∑,为偶数 求下列序列的傅里叶变换()x(2n) 令,于是 -n 1 1 121 z (1) 2u(n)()2 ()2 1,|(2)|11(2),||n n n n n n X z u n z z z z z z z +∞ --=-∞+∞ --=-∞ --=== <-=>-∑∑14.求出下列序列的变换及收敛域 3.3(1).()cos(),781() 8 (2).()5.25n 640() (5)()x n A n A j n x n e x n y n e πππω=--==判断下面的序列是否周期的是常数 试判断系统是否为线性时不变的()y(n)=x (n)(7) y(n)=x(n)sin() .试判断系统是否为因果稳定系统()y(n)=x(n-n ) -1 -1-2 -1 -1112 1-317.X(z)=,2-5+2105< | z | < 2x(n)(2) | z | > 2x(n) 11 X(z)= -1-z 1-2z 05< | z | < 2(n)=2(-n-1)+()(n) | z | > 2(n)=()(n)-2(n)n n n n z z z u u u u 已知分别求:()收敛域.对应的原序列收敛域对应的原序列解:收敛域.时: x 收敛域时: x -1-1 -1 -1-1 -1 21.(n)=0.9y(n-1)+x(n)+0.9x(n-1)(1)h(n)(2)H(e )1+0.9(1)H(z)=,|z|>0.91-0.91+0.9F(z)=H(z)z =z 1-0.9n 1z=0.9(n j n n z z z z h ω≥已知线性因果网络用下面差分方程表示: y 求网络的系统函数及单位脉冲响应写出网络频率响应函数的表达式,并定性画出其幅频特性曲线解: 令当时,有极点-1-1=0.9-112-1-1-1-1=0=0.9-1-1)=Res[F(z),0.9]1+0.9=z (z-0.9)|1-0.9=20.9(n)=0,n<0 n=0z =0,=0.9(n)=Res[F(z),0]+Res[F(z),0.9]1+0.91+0.9=z z|+z (z-0.9)|1-0.91-0.9=-1+2=1 h(n)=n z n z z z z z h z z z z ?∴因为系统是因果系统,所以有h 当时,有极点00000000=0n-m =0n -m =0 n n 20.9(n-1)+(n)+0.9 (2)H(e )=-0.9 (3)y(n)=h(n)*x(n) =(m)x(n-m) =(m)e =(m)e e =e H(e )+0.9=e -0.9 n j j j m j m j j m j j j j j u e e h h h e e ωω ω ωωωωωωωωδ∞ ∞ ∞ ?∑∑∑( ) 西安电子 ( 高西全丁美玉第三版 ) 数字信号处理课后答案 1.2 教材第一章习题解答 1. 用单位脉冲序列 (n) 及其加权和表示 题 1 图所示的序列。 解: x( n)(n 4) 2 (n 2) ( n 1) 2 (n)(n 1) 2 (n 2) 4 ( n 3) 0.5 (n 4) 2 (n 6) 2n 5, 4 n 1 2. 给定信号: x( n) 6,0 n 4 0, 其它 (1)画出 x( n) 序列的波形,标上各序列的值; (2)试用延迟单位脉冲序列及其加权和表示 x(n) 序列; (3)令 x 1( n) 2x(n 2) ,试画出 x 1( n) 波形; (4)令 x 2 (n) 2x(n 2) ,试画出 x 2 (n) 波形; (5)令 x 3 (n) 2x(2 n) ,试画出 x 3 (n) 波形。 解: ( 1) x(n) 的波形如 题 2 解图(一) 所示。 ( 2) x(n)3 ( n 4) (n 3) (n 2) 3 ( n 1) 6 (n) 6 (n 1) 6 ( n 2) 6 (n 3) 6 (n 4) ( 3) x 1 (n) 的波形是 x(n) 的波形右移 2 位,在乘以 2,画出图形如 题 2 解图(二) 所示。 ( 4) x 2 (n) 的波形是 x(n) 的波形左移 2 位,在乘以 2,画出图形如 题 2 解图(三) 所示。 ( 5)画 x 3 (n) 时,先画 x(-n) 的波形,然后再右移 2 位, x 3 ( n) 波形如 题 2 解图(四) 所 示。 3. 判断下面的序列是否是周期的,若是周期的,确定其周期。 (1) x( n) Acos( 3 n ) ,A 是常数; 7 8 (2) x(n) j ( 1 n ) e 8 。 解: ==============================绪论============================== 1. A/D 8bit 5V 00000000 0V 00000001 20mV 00000010 40mV 00011101 29mV ==================第一章 时域离散时间信号与系统================== 1. ①写出图示序列的表达式 答:3)1.5δ(n 2)2δ(n 1)δ(n 2δ(n)1)δ(n x(n)-+---+++= ②用δ(n) 表示y (n )={2,7,19,28,29,15} 2. ①求下列周期 )5 4sin( )8 sin( )4() 51 cos()3() 54sin()2() 8sin( )1(n n n n n π ππ π - ②判断下面的序列是否是周期的; 若是周期的, 确定其周期。 (1)A是常数 8ππn 73Acos x(n)??? ? ??-= (2) )8 1 (j e )(π-=n n x 解: (1) 因为ω= 73π, 所以314 π2=ω, 这是有理数, 因此是周期序列, 周期T =14。 (2) 因为ω= 81, 所以ω π2=16π, 这是无理数, 因此是非周期序列。 ③序列)Acos(nw x(n)0?+=是周期序列的条件是是有理数2π/w 0。 3.加法 乘法 序列{2,3,2,1}与序列{2,3,5,2,1}相加为__{4,6,7,3,1}__,相乘为___{4,9,10,2} 。 移位 翻转:①已知x(n)波形,画出x(-n)的波形图。 ② 尺度变换:已知x(n)波形,画出x(2n)及x(n/2)波形图。 卷积和:①h(n)*求x(n),其他02 n 0n 3,h(n)其他03n 0n/2设x(n) 例、???≤≤-=???≤≤= }2 3 ,4,7,4,23{0,h(n)*答案:x(n)= ②已知x (n )={1,2,4,3},h (n )={2,3,5}, 求y (n )=x (n )*h (n ) x (m )={1,2,4,3},h (m )={2,3,5},则h (-m )={5,3,2}(Step1:翻转) 解得y (n )={2,7,19,28,29,15} ③(n)x *(n)x 3),求x(n)u(n u(n)x 2),2δ(n 1)3δ(n δ(n)2、已知x 2121=--=-+-+= }{1,4,6,5,2答案:x(n)= 4. 如果输入信号为 ,求下述系统的输出信号。 西安电子(高西全丁美玉第三版)数字信号处理课后答案 1.2 教材第一章习题解答 1. 用单位脉冲序列()n δ及其加权和表示题1图所示的序列。 解: ()(4)2(2)(1)2()(1)2(2)4(3) 0.5(4)2(6) x n n n n n n n n n n δδδδδδδδδ=+++-+++-+-+-+-+- 2. 给定信号:25,41()6,040,n n x n n +-≤≤-?? =≤≤?? ?其它 (1)画出()x n 序列的波形,标上各序列的值; (2)试用延迟单位脉冲序列及其加权和表示()x n 序列; (3)令1()2(2)x n x n =-,试画出1()x n 波形; (4)令2()2(2)x n x n =+,试画出2()x n 波形; (5)令3()2(2)x n x n =-,试画出3()x n 波形。 解: (1)x(n)的波形如题2解图(一)所示。 (2) ()3(4)(3)(2)3(1)6() 6(1)6(2)6(3)6(4) x n n n n n n n n n n δδδδδδδδδ=-+-+++++++-+-+-+- (3)1()x n 的波形是x(n)的波形右移2位,在乘以2,画出图形如 题2解图(二)所示。 (4)2()x n 的波形是x(n)的波形左移2位,在乘以2,画出图形如题2解图(三)所示。 (5)画3()x n 时,先画x(-n)的波形,然后再右移2位,3()x n 波形如题2解图(四)所示。 3. 判断下面的序列是否是周期的,若是周期的,确定其周期。 (1)3()cos()78 x n A n π π= -,A 是常数; (2)1 ()8 ()j n x n e π-=。 解: (1)3 214 , 73w w π π= = ,这是有理数,因此是周期序列,周期是T=14; (2)12,168w w π π ==,这是无理数,因此是非周期序列。 5. 设系统分别用下面的差分方程描述,()x n 与()y n 分别表示系统输入和输出,判断系统是否是线性非时变的。 (1)()()2(1)3(2)y n x n x n x n =+-+-; (3)0()()y n x n n =-,0n 为整常数; (5)2()()y n x n = ; (7)0 ()() n m y n x m ==∑ 。 解: (1)令:输入为0()x n n -,输出为 ' 000' 0000()()2(1)3(2) ()()2(1)3(2)() y n x n n x n n x n n y n n x n n x n n x n n y n =-+--+---=-+--+--= 故该系统是时不变系统。 1.、 2. 用冲激响应不变法将以下 )(s H a 变换为 )(z H ,抽样周期为T 。 为任意正整数 ,)()( )2()()( )1(02 2n s s A s H b a s a s s H n a a -=+++= 分析: ①冲激响应不变法满足 ) ()()(nT h t h n h a nT t a ===,T 为抽样间隔。这种变 换法必须)(s H a 先用部分分式展开。 ②第(2)小题要复习拉普拉斯变换公式 1!][+= n n S n t L , n a n t s a S S A s H t u n t Ae t h )()()()!1()(010-= ?-=-, 可求出 ) ()()(kT Th t Th k h a kT t a ===, | 又 dz z dX z k kx ) ()(-?,则可递推求解。 解: (1) 22111()()2a s a H s s a b s a jb s a jb ?? += =+??+++++-?? [] )( 2 1)()()(t u e e t h t jb a t jb a a --+-+= 由冲激响应不变法可得: []()()()() ()2a jb nT a j b nT a T h n Th nT e e u n -+--==+ 110 11() () 211n aT jbT aT jbT n T H z h n z e e z e e z ∞ ------=?? ==+??--??∑ 2211cos 21cos 1 ------+--?=z e bT z e bT z e T aT aT aT 《数字信号处理》第三版课后答案 西安电子(高西全丁美玉第三版)数字信号处理课后答案 1.2 教材第一章习题解答 1. 用单位脉冲序列()n δ及其加权和表示题1图所示的序列。 解: ()(4)2(2)(1)2()(1)2(2)4(3) 0.5(4)2(6) x n n n n n n n n n n δδδδδδδδδ=+++-+++-+-+-+-+- 2. 给定信号: 25,41()6,04 0,n n x n n +-≤≤-?? =≤≤??? 其它 (1)画出()x n 序列的波形,标上各序列的值; (2)试用延迟单位脉冲序列及其加权和表示()x n 序列; (3)令1 ()2(2)x n x n =-,试画出1 ()x n 波形; (4)令2 ()2(2)x n x n =+,试画出2 ()x n 波形; (5)令3 ()2(2)x n x n =-,试画出3 ()x n 波形。 解: (1)x(n)的波形如题2解图(一)所示。 (2) ()3(4)(3)(2)3(1)6() 6(1)6(2)6(3)6(4) x n n n n n n n n n n δδδδδδδδδ=-+-+++++++-+-+-+- (3)1 ()x n 的波形是x(n)的波形右移2位,在乘以2,画出图形如题2解图(二)所示。 (4)2 ()x n 的波形是x(n)的波形左移2位,在乘 以2,画出图形如题2解图(三)所示。 (5)画3 ()x n 时,先画x(-n)的波形,然后再右 移2位,3 ()x n 波形如题2解图(四)所示。 3. 判断下面的序列是否是周期的,若是周期的,确定其周期。 (1)3()cos()78 x n A n π π=-,A 是常数; (2)1 ()8 ()j n x n e π-=。 解: (1)3214 ,73 w w ππ==,这是有理数,因此是周期序列,周期是T=14; (2)12,168w w ππ==,这是无理数,因此是非周期序列。 5. 设系统分别用下面的差分方程描述,()x n 与()y n 分别表示系统输入和输出,判断系统是否是线性非时变的。 (1)()()2(1)3(2)y n x n x n x n =+-+-; (3)0 ()()y n x n n =-,0 n 为整常数; (5)2 ()()y n x n =; (7)0 ()()n m y n x m ==∑。 5.设系统分别用下面的差分方程描述,x(n)与y(n)分别表示系统输入和输出,判断系统是否是线性非时变的。 (1)y(n)=x(n)+2x(n-1)+3x(n-2) (2)y(n)=2x(n)+3 (3)y(n)=x(n-n0)n0为整常数 (4)y(n)=x(-n) (5)y(n)=x2(n) (6)y(n)=x(n2) (7)y(n)=(8)y(n)=x(n)si n(ωn) 解:(1)令输入为x(n-n0) 输出为y′(n)=x(n-n0)+2x(n-n0-1)+3x(n-n0-2) y(n-n0)=x(n-n0)+2x(n—n0—1)+3(n-n0-2) =y′(n) 故该系统是非时变系统。因为 y(n)=T[ax1(n)+bx2(n)] =ax1(n)+bx2(n)+2[ax1(n-1)+bx2(n-1)] +3[ax1(n-2)+bx2(n-2)] T[ax1(n)]=ax1(n)+2ax1(n-1)+3ax1(n-2) T[bx2(n)]=bx2(n)+2bx2(n-1)+3bx2(n-2) 所T[ax1(n)+bx2(n)]=aT[x1(n)]+bT[x2(n)] 故该系统是线性系统。 6)y(n)=x(n2) 令输入为x(n-n0) 输出为y′(n)=x((n-n0)2) y(n-n0)=x((n-n0)2)=y′(n) 故系统是非时变系统。由于 T[ax1(n)+bx2(n)]=ax1(n2)+bx2(n2) =aT[x1(n)]+bT[x2(n)] 故系统是线性系统。 8)y(n)=x(n) sin(ωn) 令输入为x(n-n0) 输出为y′(n)=x(n-n0) sin(ωn) y(n-n0)=x(n-n0) sin[ω(n-n0)]≠y′(n) 故系统不是非时变系统。由于 T[ax1(n)+bx2(n)]=ax1(n) sin(ωn)+bx2(n) sin(ωn) =aT[x1(n)]+bT[x2(n)] 故系统是线性系统。 14.求出以下序列的Z变换及收敛域: (1) 2-nu(n) (2) -2-nu(-n-1) 解 (3) 2-nu(-n) (4) δ(n) (5) δ(n-1) (6) 2-n[u(n)-u(n-10)] 数字信号处理(姚天任江太辉)第三版 课后习题答案 第二章 2.1 判断下列序列是否是周期序列。若是,请确定它的最小周期。 (1)x(n)=Acos( 6 85ππ+n ) (2)x(n)=)8 (π-n e j (3)x(n)=Asin( 3 43ππ+n ) 解 (1)对照正弦型序列的一般公式x(n)=Acos(?ω+n ),得出= ω8 5π 。因此5162= ω π 是有理数,所以是周期序列。最小周期等于N=)5(165 16 取k k =。 (2)对照复指数序列的一般公式x(n)=exp[ωσj +]n,得出8 1 =ω。因此π ω π162=是无理数,所以不是周期序列。 (3)对照正弦型序列的一般公式x(n)=Acos(?ω+n ),又x(n)=Asin(3 43ππ+n )=Acos( -2π343ππ-n )=Acos(6143-n π),得出=ω43π。因此3 8 2=ωπ是有理数,所以是周期序列。最小周期等于N=)3(83 8 取k k = 2.2在图2.2中,x(n)和h(n)分别是线性非移变系统的输入和单位取样响应。计算并列的x(n)和h(n)的线性卷积以得到系统的输出y(n),并画出y(n)的图形。 解 利用线性卷积公式 y(n)= ∑∞ -∞ =-k k n h k x )()( 按照折叠、移位、相乘、相加、的作图方法,计算y(n)的每一个取样值。 (a) y(0)=x(O)h(0)=1 y(l)=x(O)h(1)+x(1)h(O)=3 y(n)=x(O)h(n)+x(1)h(n-1)+x(2)h(n-2)=4,n ≥2 (b) x(n)=2δ(n)-δ(n-1) h(n)=-δ(n)+2δ(n-1)+ δ(n-2) y(n)=-2δ(n)+5δ(n-1)= δ(n-3) (c) y(n)= ∑∞ -∞ =--k k n k n u k u a )()(= ∑∞ -∞ =-k k n a =a a n --+111u(n) 2.3 计算线性线性卷积 (1) y(n)=u(n)*u(n) (2) y(n)=λn u(n)*u(n) 解:(1) y(n)= ∑∞ -∞=-k k n u k u ) ()( = ∑∞ =-0 )()(k k n u k u =(n+1),n ≥0 即y(n)=(n+1)u(n) 数字信号处理第三版课 后习题答案 Company Document number:WTUT-WT88Y-W8BBGB-BWYTT-19998 数字信号处理课后答案 教材第一章习题解答 1.用单位脉冲序列()n δ及其加权和表示题1图所示的序列。解: 2.给定信号: 25,41 ()6,04 0, n n x n n +-≤≤- ? ? =≤≤ ? ? ?其它 (1)画出() x n序列的波形,标上各序列的值; (2)试用延迟单位脉冲序列及其加权和表示() x n序列; (3)令 1()2(2) x n x n =-,试画出1() x n波形; (4)令 2()2(2) x n x n =+,试画出2() x n波形; (5)令 3()2(2) x n x n =-,试画出3() x n波形。解: (1)x(n)的波形如题2解图(一)所示。(2) (3) 1() x n的波形是x(n)的波形右移2位,在乘以2,画出图形如题2解图(二)所示。 (4) 2() x n的波形是x(n)的波形左移2位,在乘以2,画出图形如题2解图(三)所示。 (5)画 3() x n时,先画x(-n)的波形,然后再右移2位,3() x n波形如题2解图(四)所示。 3.判断下面的序列是否是周期的,若是周期的,确定其周期。 (1)3()cos()7 8x n A n π π=-,A 是常数; (2)1 ()8 ()j n x n e π-=。 解: (1)3214 ,73 w w ππ==,这是有理数,因此是周期序列,周期是T=14; (2)12, 168w w π π==,这是无理数,因此是非周期序列。 5.设系统分别用下面的差分方程描述,()x n 与()y n 分别表示系统输入和输出,判断系统是否是线性非时变的。 (1)()()2(1)3(2)y n x n x n x n =+-+-; (3)0()()y n x n n =-,0n 为整常数; (5)2()()y n x n =; (7)0()()n m y n x m ==∑。 解: (1)令:输入为0()x n n -,输出为 '000' 0000()()2(1)3(2) ()()2(1)3(2)() y n x n n x n n x n n y n n x n n x n n x n n y n =-+--+---=-+--+--= 故该系统是时不变系统。 故该系统是线性系统。 (3)这是一个延时器,延时器是一个线性时不变系统,下面予以证明。 令输入为1()x n n -,输出为'10()()y n x n n n =--,因为 数字信号处理课后答案 1.2 教材第一章习题解答 1. 用单位脉冲序列()n δ及其加权和表示题1图所示的序列。 解: ()(4)2(2)(1)2()(1)2(2)4(3) 0.5(4)2(6) x n n n n n n n n n n δδδδδδδδδ=+++-+++-+-+-+-+- 2. 给定信号:25,41()6,040,n n x n n +-≤≤-?? =≤≤??? 其它 (1)画出()x n 序列的波形,标上各序列的值; (2)试用延迟单位脉冲序列及其加权和表示()x n 序列; (3)令1()2(2)x n x n =-,试画出1()x n 波形; (4)令2()2(2)x n x n =+,试画出2()x n 波形; (5)令3()2(2)x n x n =-,试画出3()x n 波形。 解: (1)x(n)的波形如题2解图(一)所示。 (2) ()3(4)(3)(2)3(1)6() 6(1)6(2)6(3)6(4) x n n n n n n n n n n δδδδδδδδδ=-+-+++++++-+-+-+- (3)1()x n 的波形是x(n)的波形右移2位,在乘以2,画出图形如题2解图(二)所示。 (4)2()x n 的波形是x(n)的波形左移2位,在乘以2,画出图形如题2解图(三)所示。 (5)画3()x n 时,先画x(-n)的波形,然后再右移2位,3()x n 波形如题2解图(四)所示。 3. 判断下面的序列是否是周期的,若是周期的,确定其周期。 (1)3()cos()7 8x n A n π π=-,A 是常数; (2)1 ()8 ()j n x n e π-=。 解: (1)3214 , 73w w ππ==,这是有理数,因此是周期序列,周期是T=14; (2)12,168w w π π==,这是无理数,因此是非周期序列。 5. 设系统分别用下面的差分方程描述,()x n 与()y n 分别表示系统输入和输出,判断系统是否是线性非时变的。 (1)()()2(1)3(2)y n x n x n x n =+-+-; (3)0()()y n x n n =-,0n 为整常数; (5)2()()y n x n =; (7)0()()n m y n x m ==∑。 解: (1)令:输入为0()x n n -,输出为 '000' 0000()()2(1)3(2) ()()2(1)3(2)() y n x n n x n n x n n y n n x n n x n n x n n y n =-+--+---=-+--+--= 故该系统是时不变系统。 12121212()[()()] ()()2((1)(1))3((2)(2)) y n T ax n bx n ax n bx n ax n bx n ax n bx n =+=++-+-+-+- 1111[()]()2(1)3(2)T ax n ax n ax n ax n =+-+- 2222[()]()2(1)3(2)T bx n bx n bx n bx n =+-+- 数字信号处理课后答案 教材第一章习题解答 1.用单位脉冲序列()n δ及其加权和表示题1图所示的序列。解: 2.给定信号: 25,41 ()6,04 0, n n x n n +-≤≤- ? ? =≤≤ ? ? ?其它 (1)画出() x n序列的波形,标上各序列的值; (2)试用延迟单位脉冲序列及其加权和表示() x n序列; (3)令 1()2(2) x n x n =-,试画出1() x n波形; (4)令 2()2(2) x n x n =+,试画出2() x n波形; (5)令 3()2(2) x n x n =-,试画出3() x n波形。解: (1)x(n)的波形如题2解图(一)所示。(2) (3) 1() x n的波形是x(n)的波形右移2位,在乘以2,画出图形如题2解图(二)所示。 (4) 2() x n的波形是x(n)的波形左移2位,在乘以2,画出图形如题2解图(三)所示。 (5)画 3() x n时,先画x(-n)的波形,然后再右移2位,3() x n波形如题2解图(四)所示。 3.判断下面的序列是否是周期的,若是周期的,确定其周期。 (1)3()cos()7 8x n A n π π=-,A 是常数; (2)1 ()8 ()j n x n e π-=。 解: (1)3214 , 73w w ππ==,这是有理数,因此是周期序列,周期是T=14; (2)12,168w w π π==,这是无理数,因此是非周期序列。 5.设系统分别用下面的差分方程描述,()x n 与()y n 分别表示系统输入和输出,判断系统是否是线性非时变的。 (1)()()2(1)3(2)y n x n x n x n =+-+-; (3)0()()y n x n n =-,0n 为整常数; (5)2()()y n x n =; (7)0()()n m y n x m ==∑。 解: (1)令:输入为0()x n n -,输出为 '000' 0000()()2(1)3(2) ()()2(1)3(2)() y n x n n x n n x n n y n n x n n x n n x n n y n =-+--+---=-+--+--= 故该系统是时不变系统。 故该系统是线性系统。 (3)这是一个延时器,延时器是一个线性时不变系统,下面予以证明。 令输入为1()x n n -,输出为'10()()y n x n n n =--,因为 故延时器是一个时不变系统。又因为 第一章 离散时间系统与z 变换 1.解:P(t)是一个周期函数,可以用傅氏级数来表示 ?∑ ?∑ ?? ∑∞∞-Ω-Ω-Ω-∞ -∞ =∞ ∞ -Ω-∞ -∞ =ΩΩ-Ω-Ω--Ω-∞ -∞ =Ω-= =Ω-= -=== =dt e t x e jm dt e t P t x j X e e jm t P e jm dt e T dt e t P T a e a t P t m j a jm m t j a s m t jm jm jm t jm T T t jm m m t jm m s s s s s s s s )(02/2 /)()1(21 )()()()1(21 )() 1(211)(1)(ττττπ π π )()1(21 s a m jm jm j X e m j s Ω-Ω-=∑ ∞ -∞ =Ω-τπ 2.解: 频谱混淆现象是指采样频率小于带限信号的最高频率(0到2π内) 的2倍时所产生的一种频谱混叠,使得采样后的序列不能真正反映原信号。 3.解: 对于1a x 来说M ω=2π,而s ω=8π>2M ω=4π,)(t y a ∴无失真,可以被还原; 对于2a x 来说M ω=5π,而s ω=8π<2M ω=10π,)(t y a ∴有失真,不可以被还原; ∑ ∑ ∑∞ -∞ =∞ -∞ =∞ -∞ == =-====n a s n a s n a s n t P t x t x n t P t x t x n t P t x t x 2 5cos )()()(2 3cos )()()(2cos )()()(332211ππ π 4.解: (1)δ(n)因果稳定 ;(2) δ(n-0n ),0n >=0,因果稳定;0n <0,稳定非因果 (3)u(n), 因果非稳定 ;(4)u(3-n),非因果非稳定 (5))(2n u n ,因果非稳定;(6) )(2n u n -,稳定非因果 (7))(2n R N n ,因果稳定 ;(8) )(5.0n u n ,因果稳定 (9) )(5.0n u n -,非因果非稳定;(10))(1 n u n ,因果稳定 (11) )(12 n u n ,因果稳定 ; (12) )(!1 n u n ,因果稳定 5.解: (1) ) 6()5(2)4(3)3(4)2(3)1(2)()()()() 3()2()1()()()6()5(2)4(3)3(4)2(3)1(2)()()()() 3()2()1()()(444444-+-+-+-+-+-+=?=-+-+-+=-+-+-+-+-+-+=?=-+-+-+=n n n n n n n n R n R n y n n n n n R n n n n n n n n R n R n y n n n n n R δδδδδδδδδδδδδδδδδδδδδδ(2))2(2)(2)]2()([)(2)(4244--=--?=-n R n R n n n R n y n n n δδ (3) ) ()(5.0)(231)(,4)22)(,40))()(5.0)(55n R n u n y n y n b n y n a n R n u n y n n n n ?=?=≥-=<≤?=时时 6.解: 答案很详细,考试前或者平时作业的时候可以好好研究,祝各位考试 成功!! 电子科技大学微电子与固体电子学陈钢教授著 数字信号处理课后答案 1.2 教材第一章习题解答 1. 用单位脉冲序列()n δ及其加权和表示题1图所示的序列。 解: ()(4)2(2)(1)2()(1)2(2)4(3) 0.5(4)2(6) x n n n n n n n n n n δδδδδδδδδ=+++-+++-+-+-+-+- 2. 给定信号:25,41()6,040,n n x n n +-≤≤-?? =≤≤??? 其它 (1)画出()x n 序列的波形,标上各序列的值; (2)试用延迟单位脉冲序列及其加权和表示()x n 序列; (3)令1()2(2)x n x n =-,试画出1()x n 波形; (4)令2()2(2)x n x n =+,试画出2()x n 波形; (5)令3()2(2)x n x n =-,试画出3()x n 波形。 解: (1)x(n)的波形如题2解图(一)所示。 (2) ()3(4)(3)(2)3(1)6() 6(1)6(2)6(3)6(4) x n n n n n n n n n n δδδδδδδδδ=-+-+++++++-+-+-+- (3)1()x n 的波形是x(n)的波形右移2位,在乘以2,画出图形如题2解图(二)所示。 (4)2()x n 的波形是x(n)的波形左移2位,在乘以2,画出图形如题2解图(三)所示。 (5)画3()x n 时,先画x(-n)的波形,然后再右移2位,3()x n 波形如 5. 设系统分别用下面的差分方程描述,()x n 与()y n 分别表示系统输入和输出,判断系统是否是线性非时变的。 (1)()()2(1)3(2)y n x n x n x n =+-+-; (3)0()()y n x n n =-,0n 为整常数; (5)2()()y n x n =; (7)0()()n m y n x m ==∑。 解: (1)令:输入为0()x n n -,输出为 '000' 0000()()2(1)3(2) ()()2(1)3(2)() y n x n n x n n x n n y n n x n n x n n x n n y n =-+--+---=-+--+--= 故该系统是时不变系统。 12121212()[()()] ()()2((1)(1))3((2)(2)) y n T ax n bx n ax n bx n ax n bx n ax n bx n =+=++-+-+-+- 1111[()]()2(1)3(2)T ax n ax n ax n ax n =+-+- 2222[()]()2(1)3(2)T bx n bx n bx n bx n =+-+- 1212[()()][()][()]T ax n bx n aT x n bT x n +=+ 第三章 部分习题解答 (数字信号处理(第二版),刘顺兰,版权归作者所有,未经许可,不得在互联网传播) 3.1如果一台通用计算机的速度为平均每次复乘需100μs ,每次复加需20μs ,今用来计算N=1024点的)]([n x DFT ,问用直接运算需要多少时间,用FFT 运算需要多少时间? 解: ∑?=====101010,21024,)()(N n nk N M N W n x k X 直接运算所需的总时间为 s N N s N T d μμ20)1(1002×?+×= 秒分62126201023102410010242 =≈××+×=s s s μμ FFT 运算所需总时间为 s NM s M N T F μμ201002 ×+×= s s s 717.02010102410010102421=××+×××=μμ 3.2在基-2FFT 算法中,最后一级或开始一级运算的系数10 ==N p N W W ,即可以不做乘法运算。问(1)乘法可节省多少次,所占百分比为多少? 解: 可节省 2 N 次,所占百分比为 %100log 1%100log 2 222×=×N N N N 如 8=N 则为%3.33%10031≈× 3.11以20kHz 的采样率对最高频率10kHz 的带限信号()a x t 采样,然后计算)(n x 的 1000N =个采样点的DFT ,即210()()N j nk N n X k x n e π??==∑,1000N =. (1)试求频谱采样点之间的频率间隔是多少? (2)在()X k 中,200k =对应的模拟频率是多少? (3)在()X k 中,700k =对应的模拟频率是多少? 解:(1)频谱采样点之间的频率间隔为:数字信号处理习题及答案1
数字信号处理课后答案
数字信号处理习题解答1
《数字信号处理》第三版课后答案(完整版)
数字信号处理习题及答案
数字信号处理课后答案 西安电子(高西全丁美玉第三版)
数字信号处理课后习题答案-第六章习题与答案
《数字信号处理》第三版课后答案
数字信号处理课后答案
数字信号处理课后习题答案
数字信号处理第三版课后习题答案
《数字信号处理》第三版课后习题答案
数字信号处理》第三版课后习题答案
数字信号处理课后答案 精品推荐
《数字信号处理》第三版答案(非常详细完整)
数字信号处理课后答案刘顺兰版
相关主题
文本预览