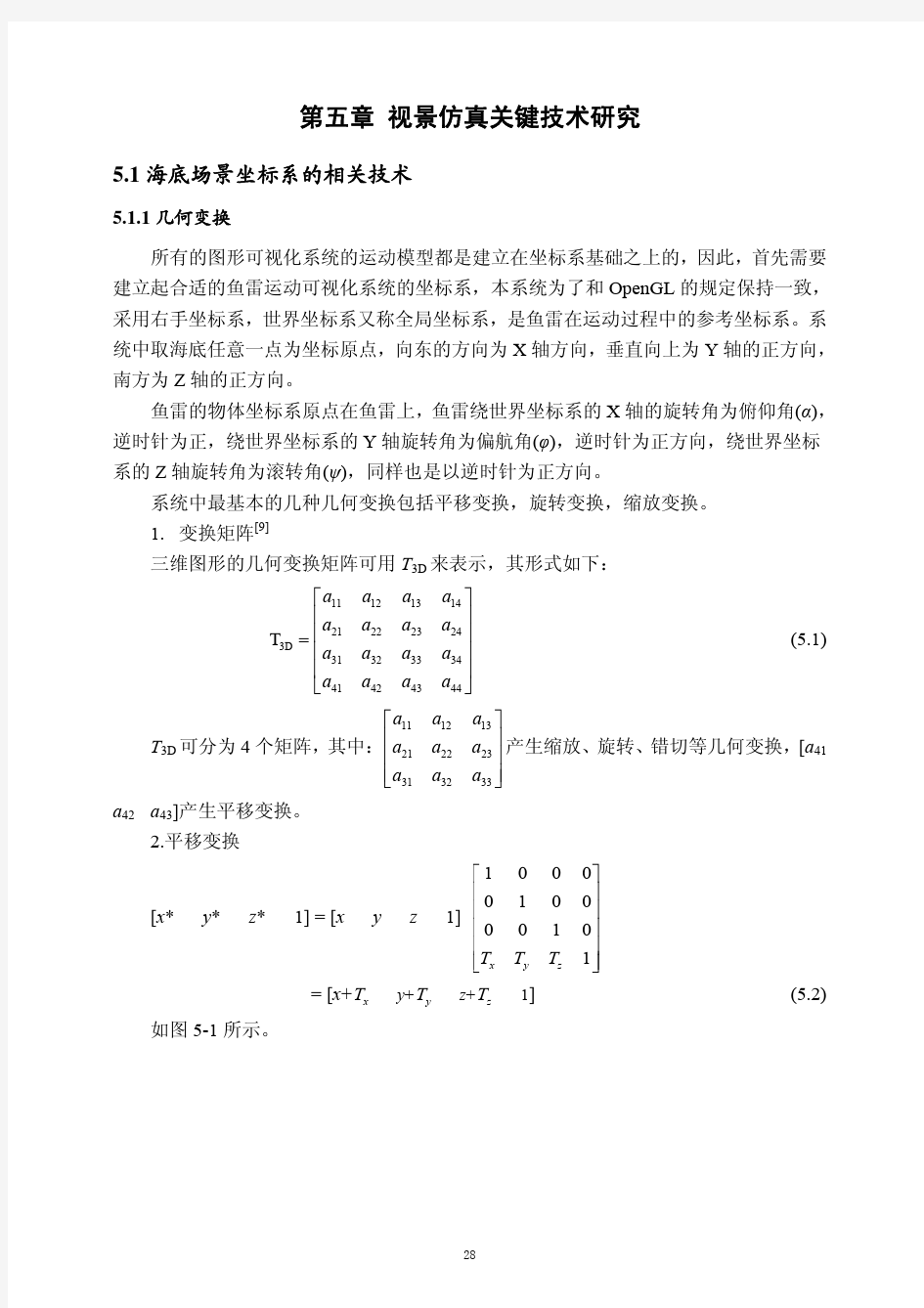
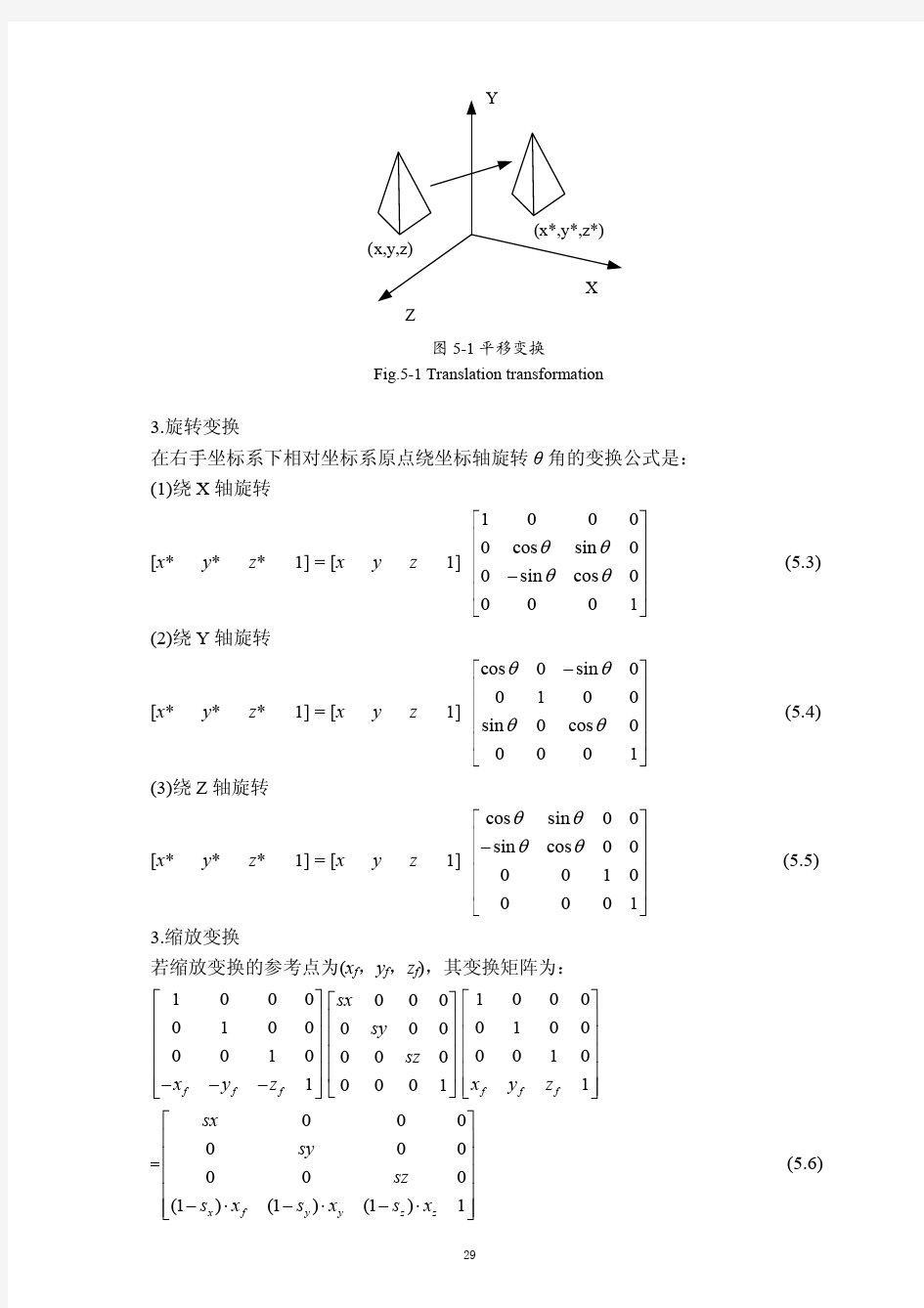
象条件,以及白天、黄昏、夜间的不同时刻景象。 操纵负荷系统:给飞行员提供操纵载荷力的感觉。运动系统给飞行员提供运动感觉,目前常采用的六自由度运动系统能提供瞬时过载,但不能提供持续过载,持续过载的模拟可采用离心机、抗荷服、过载座椅等。 3.一般要求 飞行模拟器的一般要求包括如下几个方面: (1)功能要求 能按照所模拟飞机和要求完成下列操作科目:飞行前准备、地面操作、起飞、爬升、巡航、下降、进近、中断进近、地面可视段和着陆、风切变、地面操纵(着陆后)、发动机关车及停机。 (2)仿真计算机用到的建模源数据要求 仿真计算机是飞行模拟器的核心部分,其数学建模用到的数据一般应为模拟目标飞机的真实数据。在确实没有飞机源数据的情况下,允许采用经验数据。对于新型号飞机尚未进行试飞的情况下,运行采用预测数据。当具备飞机的试飞数据后,应及时对经验数据和预测数据进行修改。建立的数学模型必须经过验证,通过与真实系统响应特性和数据的比较来进行验模的工作。
(3)对人感系统的要求 受训飞行员的感觉有操纵力感、眼睛对窗外视景和舱内仪表的感觉、耳朵对声音的感觉和身体对飞机运动的感觉。为给飞行员造成一个真实的飞行环境,飞行模拟器通常要求具体如下人感系统: 操纵负荷系统:模拟飞机的操纵感觉和配平感觉。 视景系统:模拟飞机座舱外的景象,是飞行员判断飞行品质十分重要的视觉信息。 仪表系统:在座舱仪表板按所模拟飞机座舱的布局按照飞行仪表和多功能显示设备,其外形、表盘和静、动态性能应与所模拟的飞机仪表完全一致。 运动系统:用于驱动整个模拟座舱运动,模拟飞机的空中和地面运动。通常希望采用六自由度运动系统反映飞机的三个角位移和三个直线位移的运动。 过载感觉系统:飞行员在空中感受的过载只靠运动系统是不能实现的,可采用抗负荷和过载座椅来实现。 飞行模拟器生产企业介绍 成立于2010年的福州正辉信息科技有限公司是一家集研制开发、生产、服务为一体的专业化高科技企业。该公司专注于仿真模拟器的研制,是目前中国最大的学习应用软件和特殊装备智能仿真模拟体验系统提供商之一。正辉科技一直秉承一切以客户价值为依归的经营理念,始终处于稳健、快速发展的状态。2013年5月,正辉科技的企业客户数量突破3000家;目前,正辉科技学习应用软件荣获中国软件著作权许可和中国IT产业最具竞争力品牌金奖,中国软件行业
VTD交通视景仿真_轨道方面仿真应用案例解析 概述 随着公路和轨道交通(以下简称轨交)的发展,视景仿真技术和轨交领域的结合也越来越紧密。越来越多的部门已开始研究三维视景技术在轨交仿真中的应用。研究领域包括驾驶模拟训练器,道路路况对驾驶的影响、汽车的主动安全仿真、以及列车控制系统和动力系统的运行仿真等方面。 传统的轨交仿真验证往往存在以下问题: ?显示结果不直观 传统的模型解算和分析结果往往是由一系列复杂的数据或图表,不能直观的表现出视景效果的影响。三维视景仿真可以直观展示仿真实验的可视化效果。 ?单纯视景仿真无法真实表现运动状态 单纯的视景可以较好的展现三维场景,但是仿真缺少有效的真实数据驱动,而且视景的精确度较低,无法通过视景完成精度要求高的安全辅助、舒适性体验、道路状况模拟等功能。动力学等方面的仿真数据也无法体现在视景展示中。所以单纯视景仿真的应用十分有限。?视景开发工作量大,运行不够流畅 为了保证精确度和便于仿真研究,道路/轨道的建立要遵循一定的标准。当列车或火车在路上高速行驶时,对视景的渲染效率要求很高,过于复杂的模型需要集群提供计算和数据渲染,造价高昂且意义不大。 解决方案:基于VTD的交通三维视景仿真应用 VTD—复杂交通环境视景建模、仿真软件。由德国的VIRES公司开发,主要针对复杂的实时交通环境实现视景仿真应用。除了传统的公路交通视景仿真,VTD还能很好的应用在轨交三维视景仿真中,目前VIRES已经在欧洲完成了大量公路、轨道方面的视景仿真项目,采用VTD作为三维视景开发及显示工具,以Concurrent或HiGale作为实时仿真平台。可实现驾驶模拟视景的专业开发,也可以应用在SIL、VIL、DIL、HIL等测试中,取得了很好的应用效果。本文主要介绍VTD在轨交三维视景仿真中的应用。
飞行模拟器视景仿真系统的优化设计与实现途径探索 作者:白小亮 来源:《科技创新导报》2020年第09期 摘; ;要:飞行模拟器视景仿真是飞行训练中不可或缺的重要组成部分,作为真实天气现象、飞行情况的模拟,不仅能通过真实情境的模拟提升飞行训练内容的真实度,更能通过复杂教学情境训练飞行员的应激反应、复杂问题处理等相关技能,实现结果导向训练成效。因此,飞行模拟器视景仿真系统的功能设计和内容构成布局的合理与否,对于训练成效具有直接影响。本文就飞行模拟器视景仿真系统存在的主要问题提出优化设想,并在此基础上研究实现途径。 关键词:飞行模拟器; 视景仿真系统; 优化设计; 实现途径 中图分类号:TP391.9; ; ; ; ; ; ; ; ; ; ; ; ; ; ; 文献标识码:A; ; ; ; ; ; ; ; ; ; ; ; 文章编号:1674-098X(2020)03(c)-0002-02 视景系统是用来模拟飞行员的视野,将飞行器之外的包括气象等所有与飞行任务有关的景象全景式呈现在飞行员面前,帮助飞行员判断出飞机飞行的速度、位置、飞行高度、飞行姿态等,并根据计算机成像模拟飞行状况经多屏幕显示出来,帮助飞行员实现飞行训练的专门性系统。飞行模拟器视景仿真系统虽是模拟系统,但对飞行员的实际操作能力的养成提供了前期技能训练手段,因此对于飞行员专业素养的培养和飞行经验的成长具有重要意义。航空飞行是一个集气象、空中状况和地面状况为一体的复杂场景,因此飞行员的训练周期和培养周期相对较长。当前我国已经能够实现民用飞行模拟器自主研发,是世界上为数不多的具有自主研发能力的国家之一,为我国民用航空飞行员的培训和成长做出了突出的贡献。但从目前的视景仿真模拟设计来看,我们依然存在问题亟需优化和提升。本文就目前我国主流视景仿真系统存在的主要问题,提出优化设计设想和研究实现途径。 1; 当前我国飞行模拟器视景仿真系统存在的主要问题分析 1.1 视景仿真系统仿真的真实度和实时性不能同步兼顾,影响系统整体真实效果呈现 飞行模拟器视景仿真系统可为飞行人员训练时提供逼真的座舱外景象,能提供飞行任务中约70%的有用信息,因此视景系统的图像生成和显示质量直接影响到训练的效果。以气象仿真为例,当前的气象仿真技术的实现主要基于两种技术手段得以实现:一是根据仿真平台与OpenGL之间的联系,通过OpenGL在仿真平台中实现随机闪电模拟的可行性,仿真平台中将纹理映射技术与传统闪电渲染方法相结合实现随机闪电、雨雪模拟的可行性,能够满足民航飞
仿真飞行驾驶模拟器体验说明 仿真飞行驾驶模拟器,简而言之即能够实现模拟空中飞行,通过复杂的功能装置实现零基础上手操作的飞行模拟装置,未来几年内像私家轿车一样普遍的交通发展。 仿真飞行驾驶模拟器座舱及体验,通过简单的操作装置进行详细的驾驶说明: 幻视联创飞行模拟器包含模拟座舱、运动模拟系统、视景模拟系统、指挥台以及计算机系统。游戏能够复现飞行及空中环境的操作与模拟。 1. 首先在进入到游戏之前先将引擎降到最低,按下开始键start之时可以看到有游戏的进入界面。 2.映入眼帘的是飞机在机场向跑道上滑行,当到达跑道起始点的时候可以听到提示音:“飞机滑行到指定跑道,准备起飞。”此时把引擎拉到最高。这是正式进入游戏的界面,看到准备起飞的字样,飞行员和飞机。表明飞机就现在将要进入了飞行的状态。 3.当看到姿态仪上速度达到100节(在速度线上有一红线提示)的时,将拉杆向上推起,
让飞机成为起飞的状态。 4. 此时可以看到飞机像天空中飞行,把飞机度数控制在15度左右。(幅度不要过大)这时我们要注意飞机的状态。速度控制在300节左右,高度控制在6000 m到9000m左右。如果飞行高度超过10000米,将会看到云海,尽量使飞机的飞行不要超过13000米,否则会影响飞机的飞行安全。注意飞机(中间的黄色方格)的状态高度及速度的位置变化。 5.飞机在正常飞行时,将飞机处于配平状态,即当飞机飞到一定的高度后,我们将不再提升它的高度,而是将飞机处于配平状态。同时引擎可保持在0的位置使飞机匀速前进。飞机不可能永远的向空中飞行,在一定的高度保持稳定。姿态球保持配平的状态。目的:飞机能够平衡的飞行对于乘客来说就如同在地面上一样。对乘客的安全也有了保障。
·制造业信息化· Design of Helicopter Virtual Flight Scene Simulation System WU Xue-Rong ,SU Bo (The First Aeronautical Institution of Air Force,Xinyang Henan 464000,China ) Abstract:Being based on the digital prototype of the helicopter,the helicopter flight dynamics performance simulation system is built from the point of view of the helicopter using.And the flight simulation is reproduced in the form of three-dimensional animation through stereoscopic projection system.The software is the core of the virtual simulation system,and it is responsible for the scene development,operation,and the formation,at the same time,it can connect and coordinate the system operating,so as to form a complete virtual reality system.Key words:helicopter ;simulation system ;flight scene 0引言 以数字样机为背景的计算机软件模拟仿真技术广泛应用于大型复杂武器装备的研发、设计、制造、使用和维护过程中,对装备全寿命周期的不同阶段,不同方面的重要技战术指标进行分析、评估和验证。与以物理样机为背景的模拟仿真相比,计算机模拟仿真具有安全性、经济性、超前性、灵活性、功能齐全等突出的优势。因此,计算机软件仿真逐渐成为模拟仿真的主要方法。直升机虚拟飞行视景仿真系统正是以直升机数字样机为基础,应用专业软件,从使用和维护的角度对直升机的飞行动力学性能进行模拟仿真,并通过立体投影系统以三维动画的形式再现仿真。系统的建成将在直升机理论教学、飞行仿真等方面发挥重要作用,具有显著的军事和经济效益。 1仿真系统的结构组成 系统由软件和硬件两部分构成如图1所示。硬件部分包括高性能计算机、虚拟现实交互设备和显示设备。硬件部分是软件系统运行的公共平台。软件部分包括三种不同功能的大型软件(开发平台),分别是用于沉浸式虚拟维修模块的DELMIA 、用于桌面式虚拟维修模块的 Ngrain 和用于虚拟飞行仿真模块的Flightgear ,是整个虚 拟现实系统的核心,负责整个场景的开发、运算、生 修稿日期:2012-11-25 作者简介:武雪荣(1978-),女,河南周口人,硕士,讲师。研究方向:军械装备的仿真与研究。 摘要:本仿真系统以直升机数字样机为基础,应用专业软件,从使用的角度对直升机的飞行动力学性能进 行模拟仿真,并通过立体投影系统以三维动画的形式再现仿真;软件部分是整个虚拟现实系统的核心,负责整个场景的开发、运算、生成,同时连接和协调整个系统的工作和运转,形成一个完整的虚拟现实系统。 关键词:直升机;仿真系统;飞行视景中图分类号:TP13 文献标识码:A doi:10.3969/j.issn.1002-6673.2013.01.040 文章编号:1002-6673(2013)01-102-03 直升机虚拟飞行视景仿真系统设计 武雪荣,苏波 (空军第一航空学院,河南信阳464000) 机电产品开发与创新 Development &Innovation of M achinery &E lectrical P roducts Vol.26,No.1 Jan .,2013 第26卷第1期2013年1月图1系统构成 Fig.1System structure 102
仿真器的作用 问1.用虚拟软件仿真与这个有什么区别吗?我没有看到过仿真器也没有用过仿真器 答:虚拟软件仿真,不能看到驱动硬件的实际效果。 问2.仿真器接电脑,仿真器再通过仿真头接目标板,然后程序就能在线仿真? 答:是的,连接好了以后,打开51开发软件平台KEIL,通过在KEIL中修改你的程序中不满意的部分,仿真器会在软件平台KEIL的控制下时时联 动。然后通过单步运行程序或者让程序运行到指定的程序行停止,等等调试方法调试你的程序,直到你满意为止,全部过程硬件都会和程序同步运行,所见即所得。 可以极大地提高效率,不用再反复的用编程器向51芯片中烧录程序。 问3.仿真器的本质是什么?
答:仿真器就是通过仿真头用软件来代替了在目标板上的51芯片,关键是不用反复的烧写,不满意随时可以改,可以单步运行,指定端点停止等等,调试方面极为方便。 问4.操作仿真器的软件KEIL都支持那些编程语言? 答:同时支持汇编语言和C语言。 问5.如果我不会使用KEIL怎么办? KEIL是德国开发的一个51单片机开发软件平台,最开始只是一个支持C语言和汇编语言的编译器软件。后来随着开发人员的不断努力以及版本的不断升 级,使它已经成为了一个重要的单片机开发平台,不过KEIL 的界面并不是非常复杂,操作也不是非常困难,很多工程师的开发的优秀程序都是在KEIL的平台 上编写出来的。可以说它是一个比较重要的软件,熟悉他的人很多很多,用户群极为庞大,要远远超过伟福等厂家软件用户群,操作有不懂的地方只要找相关的书看 看,到相关的单片机技术论坛问问,很快就可以掌握它的基本使用了。
问6.仿真器是不是适合初学者使用? 答:仿真器适合初学者使用,这是肯定的,使用它学习单片机自然事半功倍,但是首先必须有一定理论基础。个人认为它不适合没有任何51单片机基础的初 学者,比较适合有一定理论基础和实践经验的用户,也适合渴望开发复杂程序的有经验用户。可以说如果没有单步运行调试等手段来仿真,很难开发出复杂的程序, 在早些年因为51芯片的存储器是EPROM的,反复烧写的寿命非常有限,开发程序只能靠专业的昂贵的专业仿真器来完成,排除了所有错误之后才能写入单片机 芯片中。有了内部含有闪存的单片机之后,才使反复烧写试验成为可能,但是也还是无法实现象仿真器那样的时时调试。在公司进行单片机程序开发的工程师都是使 用仿真器,对于想真真掌握单片机开发的人,最终也一定会熟练的使用仿真器。 问7.仿真器的原理是什么? 答:仿真器内部的P口等硬件资源和51系列单片机基本是完全兼容的。仿真主控程序被存储在仿真器芯片特殊的指定
面向飞行模拟器的视景仿真系统 飞行模拟器训练是通过模拟真实飞行环境,满足初级飞行员飞行入门或者飞行员飞行恢复的必要功能训练,也是飞行特情处置演练的必备训练科目。高档的飞行模拟器中的某些功能模块,欧美等西方发达国家仍然对我国实行技术封锁和产品禁运。 在当前大力培养飞行员的过程中,存在飞行模拟器真实度不高,使得飞行模拟训练效果不佳等问题,在硬件技术逐渐被我国国产设备取代的情形下,能够模拟各种自然现象和各种飞行环境的视景仿真系统,由于开发难度大,技术门槛高等难点,迄今为止国内科研院所和企业都未能研制出来,一直依赖从国外进口,造成飞行模拟器价格奇高,二次开发系统限制多,而且也面临飞行员飞行数据泄露等问题,使得我国飞行模拟器的发展一直处于卡脖子状态,严重影响了我国飞行员的培训进程。 另一方面,由于当前的飞行模拟器存在单一的功能训练任务,而且飞行环境的逼真度不高,造成飞行员对飞行模拟器科目存在应付了事的状态,影响了飞行训练任务的落实。因此对飞行模拟器的升级改造甚至让飞行模拟器脱胎换骨,使得飞行模拟器不仅仅是飞行员对飞机座舱仪表操作的功能训练器,成为飞行员作战任务的想定推演的利器,进一步通过与真实飞机实现联网,达到与真实飞机同时进行虚实飞行对抗演练的工具,从而使得飞行模拟器真正成为飞行员的强大辅助工具。 北京大学与天津微视威信息技术有限公司联合开发的面向飞行模拟器的视景仿真系统,具有以下几个特点: 1.复杂环境实时渲染,具有模拟各种气象条件和自然环境的大于60fps高保真 场景渲染能力; 2.影像匹配实景化,具有高精度三维重建场景的快速重建与部署能力; 3.联网实时协同,具有全球场景数据库,适合联网发布,实现联网对抗和编队 飞行等作战训练; 4.复杂城市场景自动重建,具有大规模城市级三维真实感场景的自动重建; 5.完全自主知识产权的系统平台研发,可以满足各种模拟器的视景仿真系统的 二次开发需要。 本系统的创新性和先进性: 1.提出了一种影像匹配实景化技术,通过对地面三维复杂场景的快速高精度重
随着计算机和软件技术的发展,飞行模拟器的性能不断提高,已经成为保障飞行安全、大幅度提高飞行人员及机组人员的技能、缩短飞行人员训练周期、降低训练成本,以及提高训练效率的不可缺少的重要训练装备。飞行训练基地采用飞行模拟器,不仅可以提高飞行员训练水平,促进航空安全指标提升,确保飞行自主训练工作顺利实施,而且今后在飞行模拟训练上将拥有更大的自主性、自控权,并可根据飞行员的特点,有针对性地展开飞行训练,进一步提高各种训练强度。 1.定义 通俗定义:飞行模拟机就是通过电子计算机的建模运算以在地面上最大程度逼近飞机真实飞行状态,从而给飞行员营造一种全方位、多知觉、多飞行状况的真实操纵感。 严格定义:是指用于驾驶员飞行训练的航空器飞行模拟机。它是按特定机型、型号以及系列的航空器座舱一比一对应复制的,它包括表现航空器在地面和空中运行所必需的设备和支持这些设备运行的计算机程序、提供座舱外景像的视景系统以及能够提供动感的运动系统。 2.工作原理 为达到模拟飞行目的,研制者需要对模拟目标飞机飞行全过程涉及的各种动态特性建立数学模型,预编好程序并嵌入计算机运行,程序在接收到操作人员(一般为受训飞行员)的操纵信号后实现接近真实飞行的响应。具体来讲,飞行模拟机一般由仿真控制台(飞行员驾驶舱)、仿真计算机、仿真环境、飞行员共四部分组成的一个封闭反馈系统,如上图所示。其研制核心和难点在于仿真计算机,该部分的飞行动力学数学模型、系统模型、仿真环境模型、外干扰模型在经计算机求解后,通过运动系统、视景系统、音响系统给飞行员营造一种多维感知信息 的仿真环境,从而让飞行员感觉到自己犹如在空中真实操纵“飞机”一样。各主要系统简述如下: 模拟座舱:应根据需求选择其布局与特定型号飞机或组类飞机一样。模拟座舱内的仪表系统实时指示或显示各种飞行参数和系统参数。
综合项目实施需求分析(共计70分)//含配置文件 某公司总部设在,分别在市、市设有分支机构,根据公司业务不断发展需要,公司要进行信息化建设,完成总部与分支机构的互通互联,保证通信网络的安全可靠传输。 项目拓扑图: 项目需求如下: 1、要现总部与分公司和分公司互通互联,总部包含vlan2 和vlan 3 两个虚拟局域网,分公司包含vlan 4和vlan5两个虚拟局域网,分公司包含vlan6和vlan7两个虚拟局域网。(10分) 2、根据项目拓扑图合理规划ip地址,包括(设备的管理ip、设备 互联ip地址、vlan子网ip地址、ospf router id的规划),提交 ip地址规划文档。要求在192.168.1.0/24的这个网段上划分6 个子网,分别分配给以上6个虚拟局域网使用。。(10分) 3、总部要现双核心双链路互联(eth-trunk技术),保证链路级可
靠性和网关级可靠性(mstp+vrrp技术)。(10分) 4、总部到分支机构采用ppp链路互联,并且实现设备的认证(chap 认证技术)。(10分) 5、总部到分支机构采用FR帧中继链路互联,总部端设为DCE端, 分公司设为DTE端。(10分) 6、分支机构部互通互联,分支机构部互通互联。(10分) 7、全网使用ospf路由协议完成全网路由,其中总部划分在area 0 区域、分公司划分在area 1区域并且设置成为totally stub区域、分公司划分在area 2区域并且设置成为totally stub区域。(10 分) 二、踩坑注意点: 1、totally Stub 需要用HCNP中的OSPF特殊区域知识点; 2、帧中继默认属于非广播型网络,在配置OSPF的时候,需要配置静态映射,并广播。同时在OSPF中手动添加邻居。 三、配置文件: 《herb-AR0》 # sysname herb_AR0 # router id 3.3.3.3 # aaa
基于MFC 和Vega Prime 的无人机三维视景仿真实现 丁梦雨 , 芦利斌 , 金国栋 (第二炮兵工程大学907教研室,西安710025) 关键词:无人机;Creator 建模;Vega Prime ;MFC ;视景仿真 收稿日期:2013-06-14 修稿日期:2013-07-15 作者简介:丁梦雨(1989-),女,黑龙江哈尔滨人,硕士研究生,研究方向为无人机地面控制站 利用Multigen Creator 建立无人机和地形场景模型,通过Vega Prime 来驱动视景系统,实现 一个基于MFC 的可视化无人机三维视景仿真实验平台,对无人机的飞行过程进行实时描绘,良好地再现无人机自主飞行时的飞行姿态。通过无人机试飞实验证明,该视景仿真系统取得比传统视景系统更好的效果。 摘 要:文章编号:1007-1423(2013)23-0085-05DOI :10.3969/j.issn.1007-1423.2013.23.023 0引言 近年来,无人机在民用和军事领域都发挥着越来 越重要的作用。随着无人机飞行功能的日益完善,使得其飞控系统日趋复杂化,这就需要采集大量的数据。通常无人机地面站的数据回显功能主要由参数来直接显示,这样不够直观,对于非专业操作人员来说,无法快速直观地读取无人机的飞行状态。同时,无人机飞行实验具有高风险、高成本的特点,因此,开发一个能够满足无人机试飞实验的三维视景仿真系统,具有其特殊意义和重要性。无人机三维视景仿真是利用三维图像来实现无人机的飞行过程,实时地再现其飞行状态。操作人员通过观察三维仿真视景中无人机的飞行姿态,可以直接判断出无人机的飞行状态,这样就大大减少操作人员的工作量。三维视景仿真是在虚拟现实技术的基础上,综合计算机、图像、计算机交互及数据传输等技术进行可视化显示的一个重要技术,它能够实时动态地再现无人机飞行全过程,为今后研究无人机整个运动过程提供直观易懂的事实依据。 1三维视景仿真环境简介 1.1Creator 建模环境 Creator 是Multigen 公司创建的一个实时仿真建模软件,它拥有独创的用于描述三维虚拟场景的层次化数据结———OpenFlight 数据结构。这是一种树形的层次化结构,采用这种结构主要基于两点考虑[1]:一是这种结构可以方便地将模型按照几何特性进行有效地组织,并将其转化为能够方便地进行编辑和移动的节点的形式;二是这种树形结构非常适合实时系统进行各种遍历操作。其中,所谓的节点(node )就是建构层次化模型数据库最基本的元素或模块。利用Creator 构造出的模型能与实时仿真软件紧密结合[2]。 Creator 主要包括两个窗口:应用程序窗口和数据库窗口。Creator 的大部分工作都是在应用程序主窗口内的模型数据库窗口中进行的,用户可以使用Creator 的工具条、建模工具或者菜单命令,在数据库窗口内完成创建模型、调整视图、编辑模型等多种操作[1]。 1.2Vega Prime 视景仿真环境 Vega Prime 是Multigen 公司推出的最新虚拟现实开发工具,具有面向对象、功能强大、界面友好、平台兼容性好等特点。它是一个进行实时仿真和虚拟现实开发的高性能软件环境和良好工具[3],能高效地创建和配置视景仿真、基于仿真的训练、通用可视化等应用程
小型微型计算机系统Journa l o f Ch i nese C om puter Sy ste m s 2010年11月第11期V o l 31N o .112010 收稿日期:2009 08 28 基金项目:国家"八六三"高技术研究发展计划项目资助. 作者简介:郭栋梁,男,1983年生,博士研究生,研究方向为计算机图形学、虚拟现实;聂俊岚,女,1964年生,博士,教授,研究方向为虚拟现实;王艳芬,女,1982年生,硕士,助理实验师,研究方向为虚拟现实、计算机图形学;孔令富,男,1957年生,博士生导师,教授,研究方向为计算机智能控制、机器视觉. 空天一体化视景仿真关键技术研究 郭栋梁,聂俊岚,王艳芬,孔令富 (燕山大学信息科学与工程学院,河北秦皇岛066004)E m ai:l dong li an g1005@https://www.doczj.com/doc/052468813.html, 摘 要:针对空天场景中仿真实体坐标系难以组织,通过研究空天场景坐标系的一般关系树,提出基于V ega Pr i m e 的坐标系关系树组织结构;通过设计观察目标到视点距离和视域远近裁减面的函数对应关系,解决了空天场景中由于实体尺寸差别悬殊带来的展现失真问题;对气象环境加入区域约束,根据视点位置确定当前气象环境效果,实现空天场景多环境的展现.设计K T SG 系统,实现了空天一体化场景的逼真显示. 关键词:空天一体化;视景仿真;多坐标系管理;多气象环境 中图分类号:T P391 文献标识码:A 文章编号:1000 1220(2010)11 2255 05 Research on K ey T echnologies of Scene Si m ulation AboutA erospace Integration GU O D ong liang,N IE Jun lan ,W ANG Y an fen ,KONG L ing fu (In f orma tion Science and En gi n eeri ng In stit u te,Yanshan Un iversity,Q i nhuangdao 066004,Ch i n a ) Abstrac t :A no ve l organizati o na l structure o f coo rd i nate s h i e rarch ical tree t ha t base on V ega P ri m e w as propo s ed ,ai m i ng a t o rg an i z i ng the si m ulation entities i n aero s pace .A nov e l functi o n w as desi gned ,w h i ch is com po sed o f t he d istance bet w een targ et and o b serv er ,t he near c li ppi ng p l ane ,and t he far cli pp i ng plane .Succe ssfull y preven t the prob le m o f d is p l ay d isto rti on .The m ulti env iro n m ents w ere disp l ayed i n aero space scene ,buil ding on addi ng reg ion re str i c t to m eteo ro log i ca l env i ron m en.t Currentm eteo ro log i ca l en v i ron m ent w as cho se acco rd i ng t o t he po siti on o f v ie w er .K T S G syste m w as designed ,ex ac tl y d isplay i ng t he s pace scene .K ey word s :aero s pace i nteg ra tion ;scene si m ulati on ;m u lti coo rdi na t e sm anagem en ;t m ulti m eteo ro l og i ca l env iron m ent 1 引 言 空天场景是包含航天平台、临近空间平台、航空平台和地面环境一体化结合的三维场景,具有范围广、气象环境多样、实体描述复杂等特点.有效地组织三维空天场景,实现不同空间平台实时逼真地展现,在空间探测、空天虚拟战场仿真、三维游戏等方面都有着极其重要的研究意义. 作为M u lti g en Parad i gm 公司推出的支持面向对象技术的实时视景驱动软件,V eg a P ri m e 具有展现效果逼真、配置灵活、扩展模块丰富等特点,在航空航天、虚拟战场、工业仿真等诸多领域得以广泛地应用.对于空间局部区域的视景仿真,使用其自带的场景配置工具L ynx P r i m e 就能很容易地实现.然而,由于空天场景的特点,V ega Pr i m e 实现空天视景仿真会遇到如下问题: 1)描述仿真实体的坐标系各式各样.例如卫星等航空飞行器一般使用地心惯性坐标系,飞机等近地飞行器一般使用大地坐标系,而车辆、房屋等地面物体使用的却是当地坐标系.多种坐标系难以管理. 2)实体尺寸比例相差很大,如卫星、飞机尺寸等只有米数量级,而地球半径、卫星轨道半径都在数千公里甚至更高数量级,不考虑尺寸因素会产生定位精度问题和Z fighting 现象; 3)场景范围广,气象环境复杂,同一场景下不同区域不同环境的展现效果难以很好地展现,难以实现多角度、全方位观察整个空天场景. 目前对于近地平台,只对局部区域进行视景仿真[1 3];对于航天、临近空间等单一平台,通常采用非真实比例,即缩小地球和卫星半径尺寸比例进行视景仿真[4 5].无法满足既包含航空平台、临近空间平台、航天平台、又包含局部精细地形区域的空天一体化真实场景的视景仿真要求.本文从多坐标系管理、视域远近裁剪面控制和多气象环境管理等方面入手,研究如何在V ega Pr i m e 中实现真实比例、高逼真度的空天场景展示. 2 空天场景下多坐标系管理 三维场景通常采用对笛卡尔坐标系进行平移、旋转、缩放等操作来组织场景图[1],而对于空天三维场景,一部分仿真实体的位置和姿态使用笛卡尔坐标系进行描述,而其他许多仿真实体是在大地等地理坐标系中进行描述的[6,7].通过对空天仿真实体定位方式的研究,总结空天场景坐标系之间的关系,如图1所示,图中椭圆表示各种不同的坐标系,大写字母表示不同坐标系下的转换矩阵.实体本体坐标系是真正绘
摘要 随着飞行训练的成本越来越高,培训机构急需能够部分替代实际飞行训练的飞行模拟器进行飞行模拟训练,以有效地减少飞行训练的成本,提高飞行训练的效果。飞行视景仿真是飞行模拟器的一个重要组成部分,建立飞行视景仿真系统,不仅可以降低其研制和开发的费用和周期,减少各种飞机机体实际内部故障或者不可预见的复杂飞行环境导致的可能性故障,还可以向飞行人员模拟出真实的三维场景及有效的飞行信息,提供逼真的飞行效果与飞行姿态,使得培训人员可以更快速更安全更熟练地进行各种飞行操作设备,顺利完成各种飞行任务操作以达到培训目的。 本文在分析飞行仿真的需求基础上,设计的飞行模拟器可以较好地完成飞行仿真功能,提供多种飞行训练场景,有助于飞行技术的提高和飞行体验。在飞行仿真的理论基础上,借助相关的可视化技术,综合运用模型构造、系统运行、模型驱动等一系列技术,利用Creator软件进行仿真建模,完成飞机、飞行场景的建模,设计基于Vega Prime环境的飞行视景仿真系统,实现动态在线飞机飞行运动的全过程,为飞行训练提供良好的飞行仿真环境。本系统可以建立虚拟飞行训练环境,能有效的完成基本的飞行条件,提供多种飞行场景方案,但同时也有控制功能较少,场景较为单一的缺点,待后续技术条件成熟时进一步的完善与提高。 关键词:视景仿真;Creator;Vega Prime;虚拟
飞行模拟器视景仿真系统的设计与实现 Design and Implementation of flight simulator visual simulation system Abstract With the increasingly high cost of flight training in urgent need of training institutions to a partial substitute for the actual flight training, flight simulator flight simulator training to effectively reduce the cost of flight training, flight training effect. Flight simulation is an important part of the flight simulator, flight visual simulation system, to establish not only to reduce its research and development costs and cycle, to reduce a variety of airframe internal fault, or lead to unforeseen complex flight environment the possibility of failure, but also to the flight crew to simulate the real 3D scene and flight information, provide a realistic flying effect and flight attitude, making training faster, safer and more proficient in a variety of flight operations equipment, the successful completion a variety of mission operations in order to achieve the training objectives. In this paper, the demand on the basis of the analysis of flight simulation, the design of the flight simulator can be better to complete the flight simulation capabilities, providing a variety of flight training scenarios, contribute to the improvement of flight technology and flight experience. Based on the theory of flight simulation with visualization technology, and integrated use of a series of model construction, system operation, and model-driven technology, Creator software for modeling and simulation, complete aircraft, the flight scene modeling, design-based flight of the Vega Prime environment visual simulation system, the dynamic online airplane flight movement for flight training, flight simulation environment. This system can create a virtual flight training environment, the completion of the basic flight conditions, and offers a variety of flying scenes program, but we also have less control functions the shortcomings of single scene until the follow-up technical conditions are ripe to further improve and enhance . Key Words:Visual Simulation;Creator;Vega Prime;Virtual
基于模式的视景仿真系统的构建与实现 随着计算机软、硬件技术的发展与成熟,仿真模拟技术在各大领域均得到了广泛的应用和发展,视景仿真便是其中的一种。某军用电台虚拟仿真系统正是基于这一背景而提出的,包括视景仿真系统、电路仿真系统和故障库三部分。其中,视景仿真系统是整个系统最重要的部分,它通过对电路仿真结果和故障库的功能调用来实现电台整机和板卡器件及其电路波形的展示。本文以某新型军用电台为研究对象,围绕“无缝视景展示”和软件板卡级扩展的核心功能及要求,在借鉴软件设计模式的基础上,结合数据库技术、视景渲染引擎技术、MFC 面向对象设计方法设计了虚拟电台视景仿真系统的总体结构并对其 实现方法进行了描述。首先,本文阐述了软件设计模式和软件体系结构的相关概念,并重点分析比较了两种常用的交互式系统体系结构模式--MVC模式和PAC模式。通过对比研究,本文选择了MVC体系结构模式作为本视景仿真系统体系结构设计的依据。其次,总结了交互式视景仿真软件和传统的交互式软件的异同点。根据前者独有的特点,对传统的MVC模式进行改造,并裁剪掉OGRE图形渲染引擎在本仿真系统中不必要的功能,之后将其封装成为OGRE视景渲染中间件。据此提出并设计了基于MVC设计模式和视景渲染中间件的视景仿真系统软 件体系结构。第三,根据该军用电台视景仿真系统的功能需求,完成了对本视景仿真系统的组件划分(模型组件、视图组件、控制器组件和视景渲染中间件),给出了各个组件的功能、职责及各组件之间的协作关系。之后,结合设计模式的理念,设计并实现了各功能组件。最后,
给出了虚拟电台视景仿真系统的仿真流程,完成了视景仿真系统的设计实现,并展示了虚拟电台视景仿真系统的运行实例。此后,依据软件开发流程对本电台视景仿真系统进行了系统功能测试。测试结果表明该系统各项功能指标满足软件需求中所要求的功能项。如今,在该体系结构下完成的虚拟电台视景仿真系统已应用于合作方的日常教学和训练中。截至目前,合作方对此系统反应良好。
最新视景仿真工作站应用配置方案2014 XASUN 视景仿真工作站简介 XASUN拥有完美和领先的工作站硬件架构,具有强大数据计算与图形处理加速技术能力,满足大型影像级三维场景实时处理对工作站硬件配置需求,当你需要一台处理复杂3D 视景仿真工作站,我们量身定制出具有高效、精准的图形工作站,让你感受到无与伦比的专业性和高性能、高可靠,完美打造大型3D视景仿真计算应用最佳工作站硬件平台。 视景仿真工作站三大系列 (1)XASUN V330视景仿真工作站 配备4核处理器,支持超频(最高4.2Ghz),支持双图卡加速技术(SLI或交火)、延迟低高读写硬盘,满足对极限计算、大型三维模型实时生成、闪电读写要求实时处理极强应用,具备极限处理性能的强大图形工作站 (2)XASUN V460视景仿真工作站 配备6/8/10核处理器,支持超频能力,支持最高三块图卡加速技术(SLI或交火)、超低延迟高读写硬盘,满足对极限计算、闪电读写要求、实时处理应用,大型三维模型实时生成等,提供极限处理性能强大的图形工作站 (3)XASUN V570视景仿真工作站
配备16核处理器,支持超频能力,支持最高到四块图卡加速(SLI或Crossfire)、超低延迟低高读写硬盘和网卡,满足多路并发的极限计算、闪电读写要求实时处理极强的应用,提供极限处理性能强大的图形工作站 主要应用领域
●虚拟战场空间模拟训练,例如:VBS2 ●复杂三维模型设计、虚拟装配等应用,例如:ProE、UG NX、Solidworks ●大型视景仿真、虚拟现实等,例如:Vega Prime、Virtools等 ●金融行业的高频交易HFT,实时金融计算 视景仿真经典应用与配置方案 经典应用1 虚拟战场空间模拟应用方案 应用特点分析 基于交互、三维空间的综合军用单兵模拟训练系统应用,对不同未来可能的战场(其场景通常为50x50公里大小),显示包括成千上万个建筑、植被,以及相关场景的GIS和气象数据等. 要求计算机具有提供数据实时读取、处理、和场景实时生成能力,通常每秒24~100帧,其关键指标:CPU频率、基于DirectX下的GPU像素填充率、硬盘iops和读写带宽 典型配置方案参考:
综合项目实施需求分析(共计70分) #C3YB91!! ip address # interface Serial0/0/1 link-protocol ppp # interface Serial0/0/2 link-protocol ppp # interface Serial0/0/3 link-protocol ppp # interface GigabitEthernet0/0/0 ip address # interface GigabitEthernet0/0/1 # interface GigabitEthernet0/0/2
interface GigabitEthernet0/0/3 # wlan # interface NULL0 # interface LoopBack0 ip address # ospf 1 area network network network stub no-summary # user-interface con 0 user-interface vty 0 4 user-interface vty 16 20 # Return 《changc-lsw4》 # sysname changc-lsw4 # router id # vlan batch 4 to 5 300 # cluster enable ntdp enable ndp enable # drop illegal-mac alarm # dhcp enable # diffserv domain default # drop-profile default